Using a Hokuyo LiDAR to win the Roborace!
At the end of 2017, we were approached by Johannes Betz, a post-doc researcher from the Technical University of Munich and the chair of Automotive Technologies. He and his team were preparing to undertake an exciting research project in the area of autonomous and self-driving vehicles with the ultimate aim of taking part in the Roborace (roborace.com).
In order to help with the project, the team needed a Hokuyo LiDAR device and reached out to Sentek for support. As it was such an exciting project and Sentek have a long stand relationship with TUM and their spin-off companies, we were happy to give our support to the help.
Here is what Johannes had to say when we asked him about the project and how the Hokuyo LiDAR performed and aided the project…
Our team consists of 2 professors, 6 PhD students, and 25 normal students. We had 3 sub-teams working together on the project. One team for planning, one team for perception and one team for control. These are all key processes in autonomous driving.

The team at the Roborace event
Our goal was to develop and evaluate algorithms for those three parts of autonomous driving. In addition, we planned to develop and evaluate additional specific algorithms like a prediction of the adhesion factor, detection of obstacles and planning/implementing a complete and successful race strategy.
Preparing for the Roborace
We began with the development of the software in December 2017, our first competition with Roborace was in May 2018 at the Formula E event in Berlin so we had plenty of time to prepare.
The development was split into three parts:
1: Simulation of the race environment: We used the Roborace simulator
2: Real world testing with the Roborace DevBot vehicle at the race headquarters in Banbury, England: We did this testing every month and although it was crucial for the development and evaluation it took up a lot of our time and budget.
3: Smart (small) scale testing at the university: This important stage is where we built an autonomous remote controlled car which featured the Hokuyo LiDAR.
The autonomous RC car: In cooperation with some students we built an autonomous RC car.
This autonomous RC car was a 1:10 scale of a full-sized electric car. Ultrasonic sensors, a stereovision camera and the Hokuyo UST-20LX LiDAR were used to convert the car into a fully autonomous vehicle.
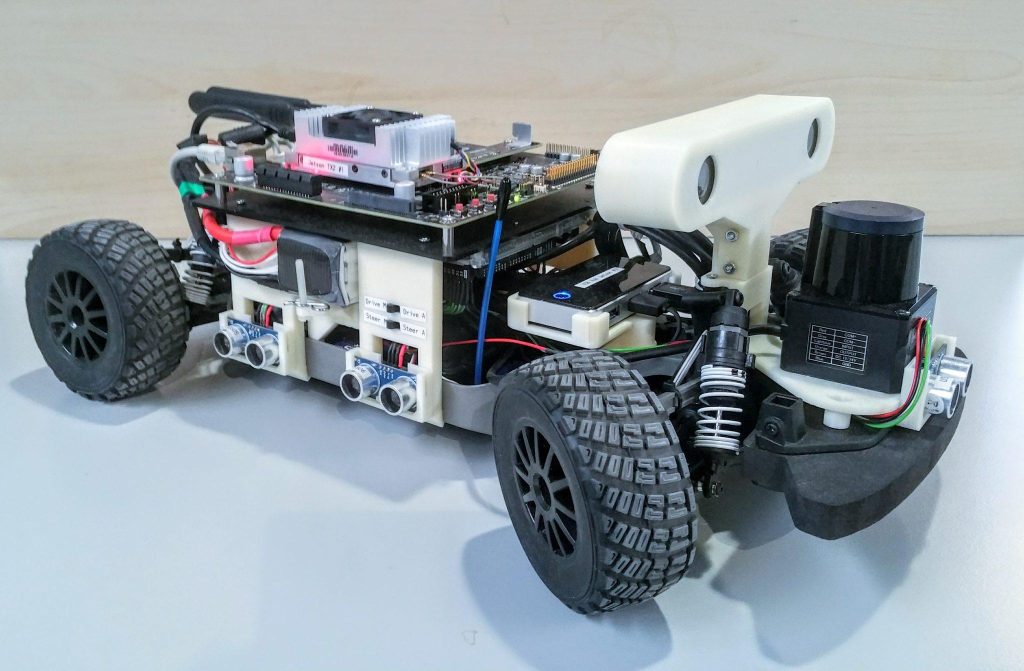
The autonomous remote controlled car featuring the Hokuyo LiDAR
We used the LiDAR on the remote-controlled car to test our SLAM and mapping algorithms that we planned to use on the full-sized car. During the project, students used the Hokuyo LiDAR for research. We had 10 students working with the LiDAR and some are still working with it (bachelors, masters, semester thesis). Here are some of the projects students are undertaking:
a) Evaluating the performance of different SLAM algorithms and different LiDAR devices.
b) Controlling the car just on range (distance) detections with the LiDAR.
c) Writing SLAM algorithms that process the LiDAR information with GPU power based on the Nvidia Jetson.
d) Writing a sensor fusion algorithm for combining LiDAR and camera information.
e) Writing a sensor fusion algorithm for combining LiDAR and ultrasonic information.
f) Writing a simple scan matcher with LiDAR data only.
g) Writing an algorithm for object detection based on LiDAR and camera data.
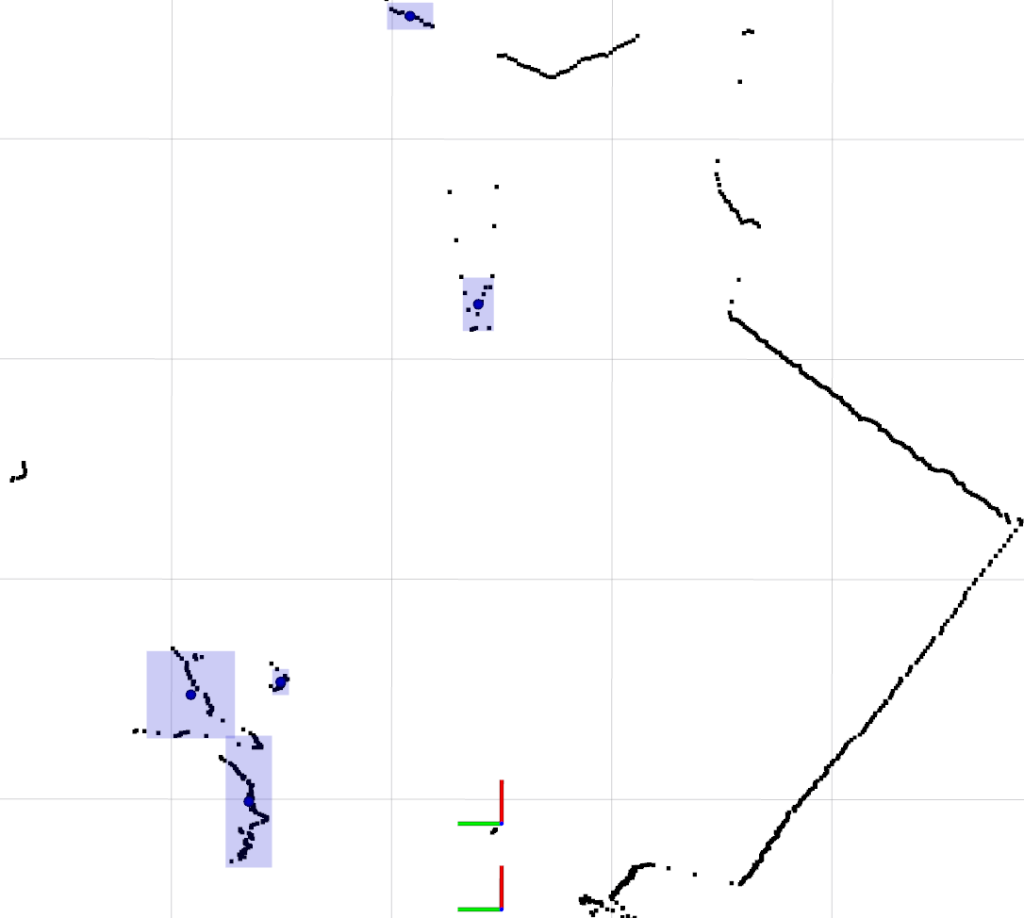
LiDAR and camera data
h) Writing an algorithm for object movement predictions based on LiDAR data.
While using the LiDAR we discovered that when compared to other LiDAR devices we have used the Hokuyo performed the best by far. Its’ data performance regarding LiDAR points, velocities and distance data are far more accurate and consistent. On top of its performance, the Hokuyo LiDAR is also much more robust than similar devices. The Hokuyo LiDAR was crucial in helping us complete the project successfully. The LiDAR enabled us to develop a platform for autonomous driving and aid with learning development for PhD students and undergraduate students. It also helped with the acceleration of the complete LiDAR environment development e.g. mapping, SLAM algorithms and object detection. The LiDAR was crucial for support with the development of software for the Roborace using the full-sized car.
The Roborace Event
In the Roborace event, we were competing against a team from the University of Pisa. Both teams had to drive the Robo-car around the track three times around the 2km track with a human at the wheel and another three times using only software and no human driver. The time of the second lap of each round is averaged and the team who had the fastest average time won the event. All of our time spent using the LiDAR, doing research, producing algorithms and testing with the autonomous remote-controlled car paid off. We won the Roborace! Our average lap time was 91.59 seconds which was nearly four seconds faster than the University of Pisa’s time.
Alongside the completion of the Roborace project, we have started a brand-new course at the university. It’s called Artificial Intelligence in Automotive Technology. It’s a practical and theoretical course which gives students the opportunity to learn everything about self-driving cars and deep learning. In addition, they are going to code everything on their laptops. At the end of the course, the students are tasked with programming the code for a self-driving “remote controlled” car. The Hokuyo LiDAR is used throughout this course.
Johannes Bets, M. SC.
Chair of Automotive Technology
TUM Department of Mechanical Engineering
Technical University of Munich.
https://www.ftm.mw.tum.de/en/home/
If you would like to find out more about this project or about how Hokuyo LiDARs can be used for academic research, autonomous driving or any other application then do not hesitate to contact us.
Browse our full selection of Hokuyo LiDARS here.
Alternatively, if you have any stories you want to share with us please contact info@sentekeurope.com
Follow us on Twitter here and find out which exhibitions we will be at here.